Autonomous Performance Management in Digital Manufacturing (AURORA) was a 3-year project (2020-2023) funded by the Research Council of Finland. The project partners were the University of Turku and VTT Technical Research Centre of Finland Ltd.
Task Allocation
One aspect of AURORA was to study the dualistic use of entropy for task allocation in a multi-robot system. To maintain a high system entropy, a coordinator will assign tasks so as to maintain an even distribution of agent capabilities in the remaining fleet. If this yields two or more candidates, the agent is selected which minimizes the task entropy, corresponding to performing the task more accurately.
The video below shows a real and simulated Autonomous Mobile Robots (AMRs) working in a shop floor machine tending scenario to demonstrate these entropy-based task allocation strategies. Three types of machines (blue, magenta, black) are present, while the AMRs have different machine tending capabilities.
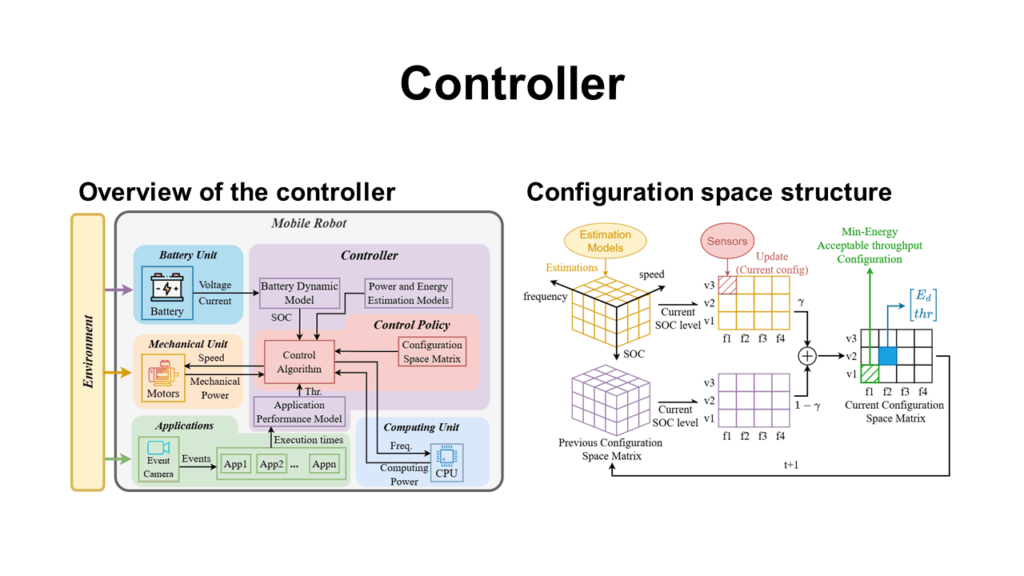
Energy-Efficient Control
This figure below shows a runtime energy-efficient control policy for mobile robot with computing workload and battery awareness.